艾利特机器人示教之插补方式和再现速度
发布时间:2022-02-11 11:39:40 作者:显扬科技
一、示教画面
打开程序文件进入程序编辑⻚⾯,即示教画面。进入示教画⾯后,主菜单栏的“程序编辑”和“编辑指令”变为可操作状态。通⽤显示区的底部显示当前文件名、总行数和当前行号等信息,⼦菜单栏显示相应的程序编辑选项。每个程序⽂件都以 “NOP”开始,以“END”结束。程序光标所在⾏会显示为蓝⾊。
二、插补方式和再现速度
再现(自动)运⾏机器人时,决定程序点与程序点之间以何种轨迹的⽅法叫插补⽅法。
程序点与程序点之间的移动速度就是再现速度。
通常位置数据、插补⽅法、再现速度,这三个数据同时被记录到机器⼈程序点位中。
● 关机插补
在机器⼈向⽬标点移动中,在不受轨迹约束的区间使⽤。若⽤关节插补示教机器⼈轴,移动命令是MOVJ。处于安全考虑,通常情况下,请⽤关节插补示教第⼀步。
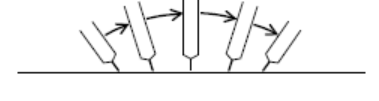
● 直线插补
⽤直线轨迹在直线插补示教的程序点中移动。若⽤直线插补示教机器⼈轴,移动命令是MOVL。直线插补常在焊接、搬运等作业中使⽤。
如图所示,机器⼈⼿腕位置⾃动⼀边变化⼀边移动,⼯具尖端点的移动路径为直线。
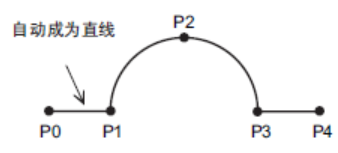
● 圆弧插补
机器⼈通过圆弧插补示教的3个点画圆移动。若⽤圆弧插补示教机器⼈轴,移动命令是MOVC。
如图所示,⽤圆弧插补示教P1-P3的三个点。若⽤关节插补或直线插补示教进⼊圆弧前的P0,则P0到P1的轨迹⾃动成为直线。
显扬科技专注研发并产业化高速高清三维机器视觉设备、智能协作机器人系统,使命是“让人类高效地用好机器人”。目前,显扬科技自主研发的三维机器视觉兼容多种品牌的机器人并已成功应用于食品、电器、陶瓷、物流、教育科技、新零售等行业。此外,显扬科技生态系统包括以下品牌:UR优傲协作机器人 、AUBO遨博移动机器人、Franka Emika 协作机器人、艾利特Elite协作机器人、Kuka iiwa 协作机器人、ABB工业机器人、海康工业镜头 、海康工业相机、伯朗特工业机器人、 爱普生Epson工业机器人、 robotiq夹爪 、robotiq真空吸盘、robotiq腕部相机、慧灵机器人电爪 、大寰机器人电爪、研华工控机、超恩工控机、创想三维3D打印机 、Mir AGV、机器人关节、精密机械加工服务。


