刮研的花纹
发布时间:2021-07-13 14:05:26 作者:显扬科技
花纹的类型有很多,在此介绍几种比较常见花纹类型,如弧形花纹、方块花纹、波浪花纹和扇形花纹,弧形花纹中主要有月亮花纹、燕子花纹。
1. 弧形花纹及刮法
首先用刮刀刃口左侧落刀,紧接着自左向右斜向刮削(如图1a所示),同时左手手腕要扭腕使刀刃顺势作一个自左向右的圆弧摆动(如图1b所示),使刃口部的刮削从左侧过渡到右侧,刀迹纵向长度一般为10mm左右,整个刮削过程瞬间完成,这样就可以刮出各种弧形花纹。也可以自右向左斜向刮削,通过左手手腕在用力下压的同时右手扭腕使刀刃顺势作一个自右向左的圆弧摆动,使刃口部的刮削从右侧过渡到左侧。

弧形花纹刮削要领:由于刮削条件和操作方法的不同,所刮出的弧形花纹的形状大小和弧形夹角也有相当的变化。一是要注意选择合适的刮刀,因为刀头部分的宽窄、厚薄、刀刃圆弧半径及楔角的大小对弧形花纹的形状都有一定影响;二是在刮削时要能够控制扭腕动作的幅度和推刮行程的长短;三是要利用刀头部分的弹性作用,一般而言,扭腕动作的幅度越大、推刮行程越短,所刮出的弧形花纹的夹角就越小、形状也越小,如图1c所示。
(1)月亮花纹及刮法 月亮花纹如图2所示。
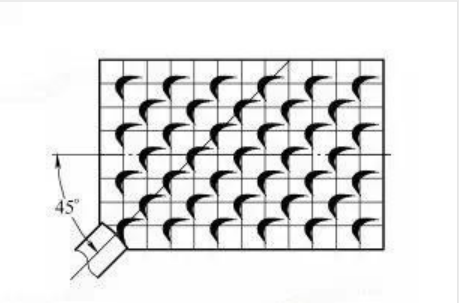
刮花前要在工件表面用铅笔划出一定间距的方格。
刮花时采用圆弧刃精刮刀,刀身平面中心线与工件表面纵向中心线成45°角,从工件的前面向后面进行刮削。
(2)燕子花纹及刮法 燕子花纹如图3a所示。刮花前要在工件表面用铅笔划出一定间距的方格。刮花时采用圆弧刃精刮刀,刀身平面中心线与工件表面纵向中心线成45°角,从工件的前面向后面进行刮削。常见的刮法是:
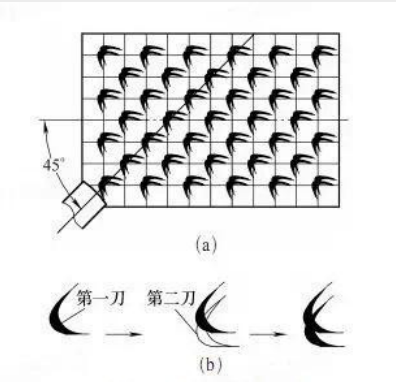
首先第一刀刮出一个弧形花纹,然后在第一个弧形花纹稍下的地方刮出第二个弧形花纹,这样就可刮出一个近似燕子的花纹,如图3 b所示。
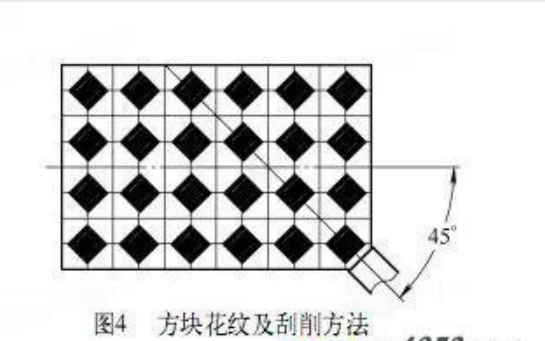
2. 方块花纹及刮法
方块花纹如图4所示。刮花前要在工件表面用铅笔划出一定间距的方格。刮花时,刀身平面中心线与工件表面纵向中心线成45°角,从工件的前面向后面进行刮削。基本刮法是:采用直线刃(或大半径圆弧刃)窄刮刀进行短程推刮,刮出第一个方块后,应间隔一个方块距离即空出一格再刮出第二个方块。
3. 波浪花纹及刮法
波浪花纹如图5a所示。刮花前要在工件表面用铅笔划出一定间距的方格。刮花时,刀身平面中心线要平行于工件表面纵向中心线,从工件的后面向前面进行刮削。基本刮法是:采用豁口刮刀进行刮削,选择好落刀位置(一般选择交点处),落刀后即向左侧斜向移动推刮,当达到一定长度时(一般选择交点处)紧接着向右侧斜向移动推刮至一定位置后起刀,如图5b所示。

4.扇形花纹及刮法
扇形花纹如图6a所示。刮花前要在工件表面用铅笔划出一定间距的方格和角度线。刮削扇形花纹要采用钩头刮刀(如图6b所示),要将刀刃右端磨锋利,左端稍钝一点,刃线要平直。基本刮法是:
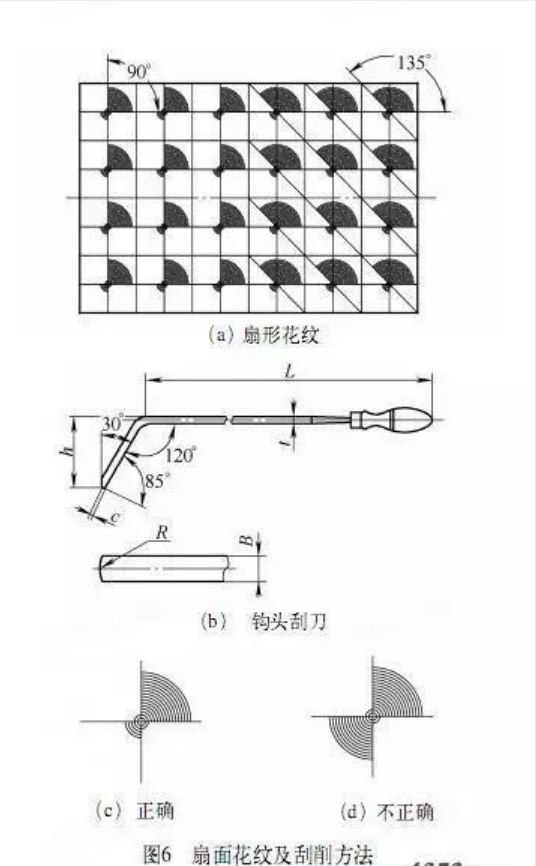
选择好落刀位置(一般选择交点处),左手握在距刀头50mm处,用力偏左下压,以刀刃左端为圆心,右手作顺时针方向旋转,旋转角度一般有90°和135°两种。正确的扇形花纹如图6c所示,由于用力不当,容易造成两端同时刮削,形成如图6d所示的花纹,这样所刮出的花纹痕迹会过浅,属于不正确的花纹。
显扬科技优势:
显扬科技是国家高新技术企业,在机器人、机器视觉方面有多年的研发与产业化经验,可为你提供完善的售后与保修服务,以及其他研发方面协作,并且提供专用移动机器人工作台。
显扬科技已成功销售Franka机器人、UR机器人、Robotiq夹具等产品给浙江大学,清华大学,哈尔滨工业大学等,获得了非常好的评价。显扬科技研发人员超过50人,精通UR,Franka,遨博机器人安装、调式、二次开发等,对基于协作机器人的各种应用开发已有超过8年经验。
关于显扬科技:
显扬科技(www.hinyeung.com)专注研发并产业化高速高清三维机器视觉设备、智能协作机器人系统。显扬科技创建了一个集高精度视觉传感器、智能协作机器人、智能感知与控制系统平台,让机器人更加智能、可靠,适用于更多复杂的应用场景。显扬科技研发的三维机器视觉设备精度能达亚微米级,三维数据采集帧率高达300帧,具有高精度、大景深、高稳定性的优势,已在多个领域成功替代进口同类产品。目前,显扬科技产品已成功应用于食品、电器、陶瓷、物流、教育科技、新零售等行业。显扬科技创始团队由香港中文大学数名博士组成,公司研发人员均来自海内外名校。公司知识产权超过50项,产品已经通过欧盟CE认证。显扬科技已完成投资与融资约5000万人民币。
显扬生态: UR优傲协作机器人 | AUBO遨博移动机器人 | Franka 协作机器人 | 艾利特协作机器人 | Kuka iiwa 协作机器人 | ABB工业机器人 | 海康工业镜头 | 海康工业相机 | 伯朗特工业机器人 | 爱普生Epson工业机器人 | robotiq夹爪 | robotiq真空吸盘 | robotiq腕部相机| 慧灵机器人电爪 | 研华工控机 |超恩工控机 | 创想三维3D打印机 | AGV | 机器人关节 | 精密机械加工服务
应用案例方向:1.三维机器视觉机器人引导系统 2.工业检测与测量系统3.教育行业解决方案4.智慧零售解决方案
应用场景:汽车制造行业 | 3C行业 | 电子电气 | 机械加工 | 液晶半导体 | 食品加工行业 | 医药行业 | 化工行业 | 教育行业 | 生活 | 其他行业
详询:18670025215(丁先生) www.hinyeung.com

