探索UR机器人丨零件拾取应用案例
发布时间:2021-06-24 17:05:13 作者:显扬科技
优傲机器人Polyscope 5.4中的新远程TCP功能解释
RTCP在诸如胶合,去毛刺,缝纫,抛光等许多工艺应用中,通常更容易用机器人拾取零件并以固定工具(例如砂带,去毛刺工具,缝纫机,抛光轮等在机器人的末端拾起砂带并移动它毕竟不是很方便。或者您可以想象将一台缝纫机连接到机器人手臂的末端并移动它。
这些工具不仅通常很重,而且通常也不是为与机器人集成而设计的,因此可能需要大量的设计工作或定制。协作机器人的整体理念是它们灵活且易于使用。
但配药怎么样?事实上,有机器人分配末端执行器可用。是的,但如果您使用机器人移动点胶末端执行器,那么您可能还需要一些其他自动化功能来将部件从胶合机器人前面移出。只有一个机器人进行材料处理并将零件展示给固定的胶合分配器会不会更容易?在某些情况下它是。这些只是Polyscope 5.4中新的,超级易用的远程TCP功能的一些例子。
远程工具中心点(通常称为远程TCP或RTCP)使用户能够相对于固定(远程)TCP编程圆移动和路径点。然而,这些熟悉而简单的命令解锁了幕后发生的强大计算魔法。系统计算如何控制机器人的速度,加速度和减速度,以在RTCP上实现零件的恒定速度。如果没有RTCP功能,特别是在零件边缘的圆弧周围进行编程非常具有挑战性。它可以使用非常小的步骤和一些微调来完成,但这可以导致数千行的程序。其他替代方案可以通过演示或离线机器人编程软件来教授。但那些可能是不精确/难以微调或昂贵/需要学习完整的编程环境。RTCP功能嵌入在eSeries机器人中,这些命令直接插入编程树中,因此无需额外学习即可使用该功能。这很精确。运动平稳流畅,每次运动的执行之间没有停止或暂停。
查看使用RTCP功能创建的这两个演示。
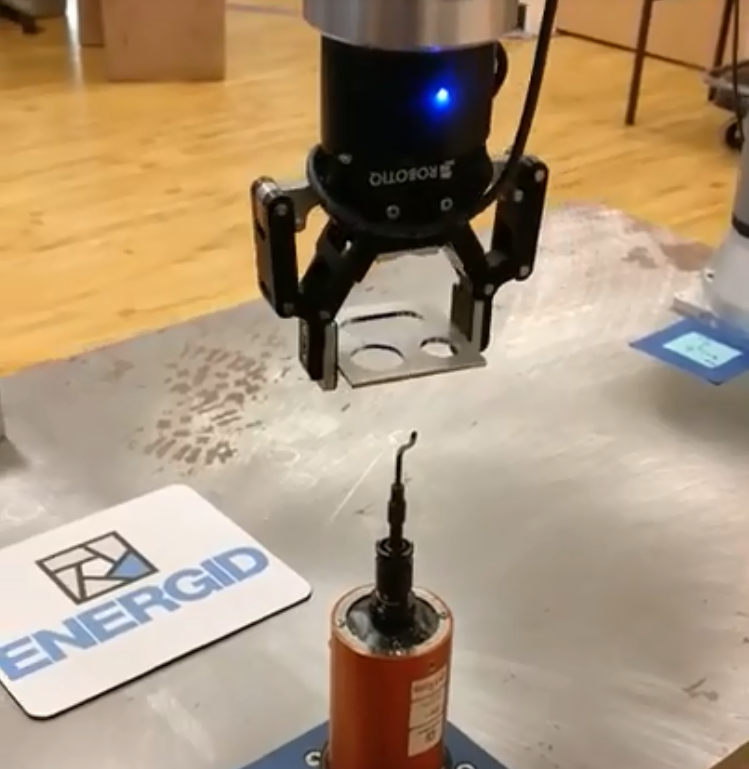
第一个演示中, ATI兼容去毛刺刀片(CDB) 固定在工作台上。配备Robotiq 2F-85自适应夹具的UR10e机器人,将金属部件呈现给ATI CDB,以去除内部特征。机器人相对于ATI CDB以恒定速度移动零件。
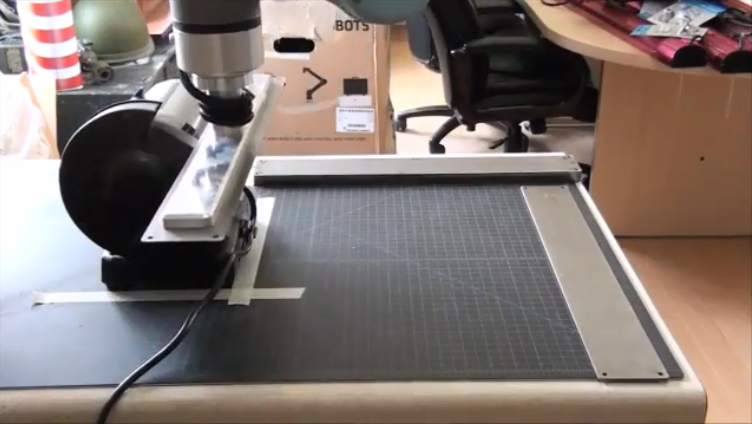
第二个演示中,轮式砂光机固定在工作台上。UR10e机器人配备定制真空末端执行器,一次拾取一个金属板,并将该部件呈现给砂轮打磨机以去除外部轮廓。机器人能够以相对于砂光机的恒定速度移动零件。
显扬科技优势:
显扬科技是国家高新技术企业,在机器人、机器视觉方面有多年的研发与产业化经验,可为你提供完善的售后与保修服务,以及其他研发方面协作,并且提供专用移动机器人工作台。显扬科技优势:
显扬科技已成功销售Franka机器人、UR机器人、Robotiq夹具等产品给浙江大学,清华大学,哈尔滨工业大学等,获得了非常好的评价。显扬科技研发人员超过50人,精通UR,Franka,遨博机器人安装、调式、二次开发等,对基于协作机器人的各种应用开发已有超过8年经验。
关于显扬科技:
显扬科技(www.hinyeung.com)专注研发并产业化高速高清三维机器视觉设备、智能协作机器人系统。显扬科技创建了一个集高精度视觉传感器、智能协作机器人、智能感知与控制系统平台,让机器人更加智能、可靠,适用于更多复杂的应用场景。显扬科技研发的三维机器视觉设备精度能达亚微米级,三维数据采集帧率高达300帧,具有高精度、大景深、高稳定性的优势,已在多个领域成功替代进口同类产品。目前,显扬科技产品已成功应用于食品、电器、陶瓷、物流、教育科技、新零售等行业。显扬科技创始团队由香港中文大学数名博士组成,公司研发人员均来自海内外名校。公司知识产权超过50项,产品已经通过欧盟CE认证。显扬科技已完成投资与融资约5000万人民币。
显扬生态: UR优傲协作机器人 | AUBO遨博移动机器人 | Franka 协作机器人 | 艾利特协作机器人 | Kuka iiwa 协作机器人 | ABB工业机器人 | 海康工业镜头 | 海康工业相机 | 伯朗特工业机器人 | 爱普生Epson工业机器人 | robotiq夹爪 | robotiq真空吸盘 | robotiq腕部相机| 慧灵机器人电爪 | 研华工控机 |超恩工控机 | 创想三维3D打印机 | AGV | 机器人关节 | 精密机械加工服务
应用案例方向:1.三维机器视觉机器人引导系统 2.工业检测与测量系统3.教育行业解决方案4.智慧零售解决方案
应用场景:汽车制造行业 | 3C行业 | 电子电气 | 机械加工 | 液晶半导体 | 食品加工行业 | 医药行业 | 化工行业 | 教育行业 | 生活 | 其他行业
详询:18670025215(丁先生) www.hinyeung.com

