显扬科技丨UR机器人大扭矩拧紧应用方案详解
发布时间:2021-06-24 11:53:36 作者:显扬科技
大扭矩拧紧是汽车总装和零部件产业中的常见应用。将各种汽车零部件装配成整车的过程,需要很多种不同类型的联接,其中螺栓联接是最重要的联接方法之一。由于螺栓联接可以获得很高的联接强度,又便于装拆,具有互换性,通过标准化实现了大批量生产,成本低而且价格便宜,经常被应用到发动机、变速箱和底盘等重要位置的装配中。螺栓的拧紧质量直接影响到产品的安全性和可靠性。
在执行螺栓拧紧任务时,经常会碰到以下问题:
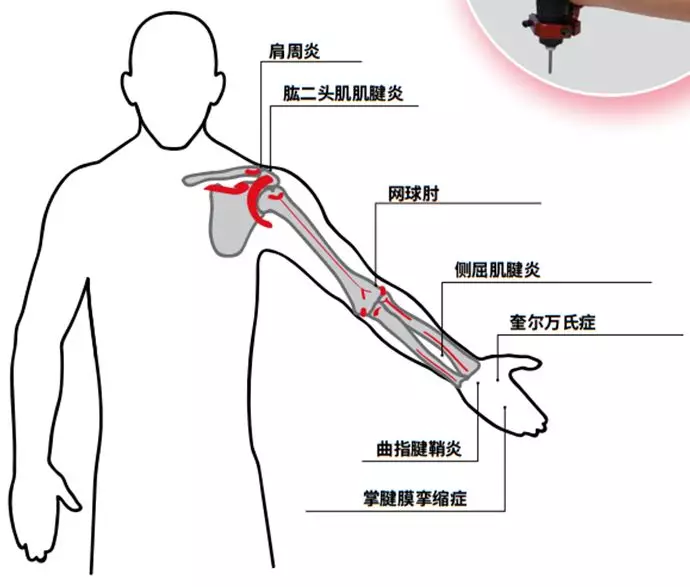
● 职业病
作业员长期受到拧紧枪的自重和反作用力的影响,导致肌腱损伤,而患上左图所示的职业病。
● 产品质量稳定性
作业员在做拧紧工作时,无法避免少打、漏打及拧紧扭矩错误的现象,且螺丝拧紧的质量随作业员的工作状态波动起伏。
● 人工成本高昂
拧紧工作在大多数生产过程中,都处于一个高负荷的工艺环节,耗费大量人工成本。
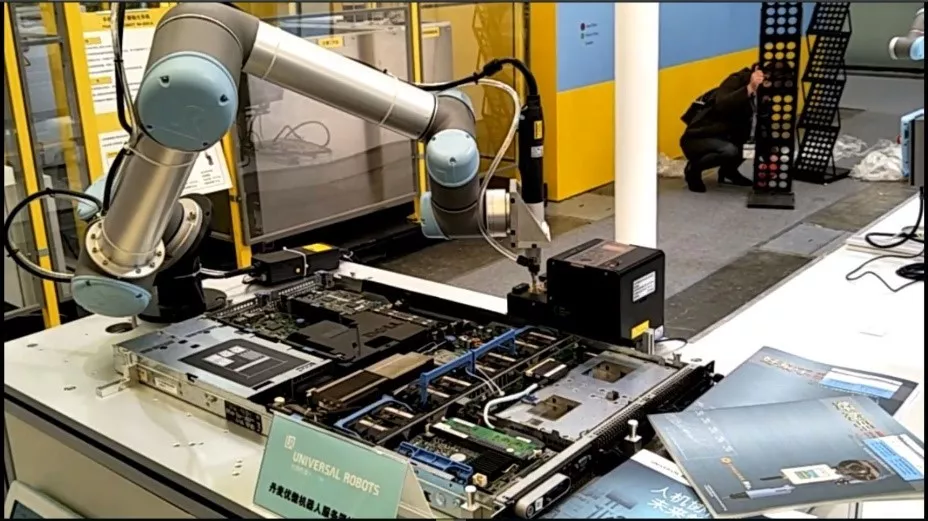
优傲机器人用于拧紧的方案:
UR机器人可以代替工人进行24小时不间断的高负荷劳动,同时将产品质量控制在一个非常稳定的状态。本方案设计的目标是将拧紧枪的反作用力平均地分配到机器人的六个关节上,我们将从拧紧枪与机器人的安装方式、机器人底座安装方式和机器人软件设置等方面进行详细介绍,来指导客户如何克服拧紧枪的反作用力。通过实际测试,UR10可以实现的扭矩范围为120Nm。
一、负载重量设计
1、在设计拧紧枪和工装夹具时,请UR提供公式计算出机器人最大允许负载,实际负载重量不要超过计算结果。
2、在机器人安装设置界面,务必要准确设置有效负载和重心。
二、拧紧枪与机器人法兰盘连接方式
工装夹具的设计原则让拧紧枪旋转轴与手腕3旋转轴方向垂直(如果两者安装方向平行,手腕3将承受来自拧紧枪的最大反作用力,极易报警),如需添加CCD,请注意机器人关节旋转时与CCD干涉问题。拧紧枪一般分为直头和弯头两种:
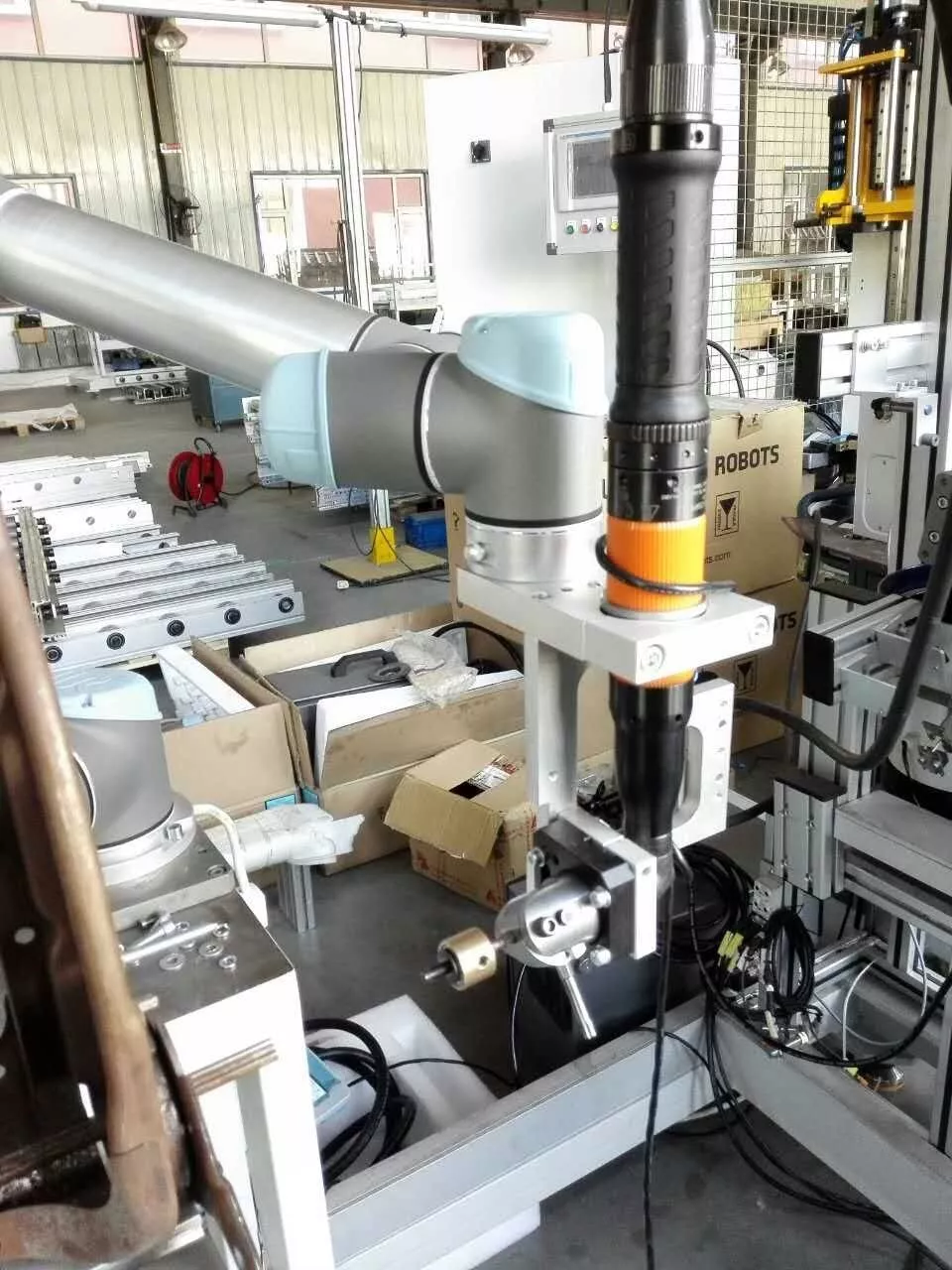
1.直头拧紧枪建议安装方式如下图所示:
2.弯头拧紧枪建议安装方式如下图所示:


三、机器人底座安装方式
1. 如果螺丝拧紧方向是垂直地面向下的情况,建议机器人底座倾斜45度安装,这样可以避免拧紧枪旋转轴和手腕2旋转方向平行(避免手腕2承受来自拧紧枪的最大反作用力),建议如下图所示安装:

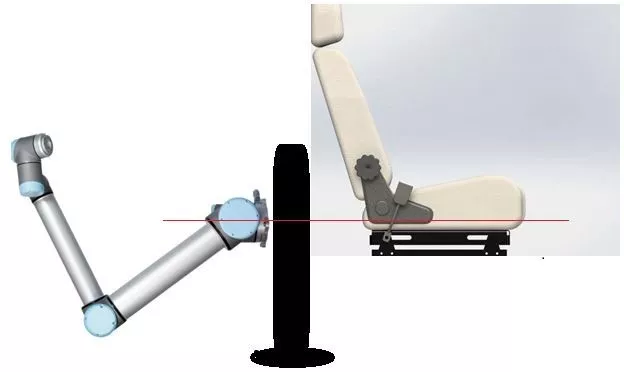
2.螺丝拧紧方向是平行于地面侧向的,且需要拧紧座椅两侧的情况。
优先考虑机器人底座侧装的方式(这种方式机器人在左右侧之间切换姿态比较自由),如下图所示:
 其次考虑机器人底座正装的方式,如下图所示:
其次考虑机器人底座正装的方式,如下图所示: 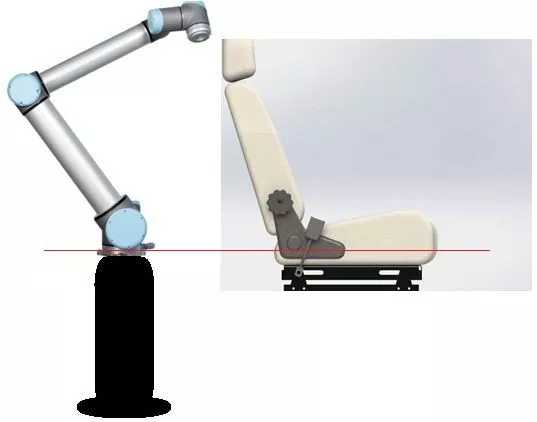
注意:机器人底座位置尽量与螺丝孔位处于同一水平高度。
四、IO信号连接
优傲机器人与拧紧枪通讯一般采用数字IO信号连接,优傲机器人也支持Ethernet、Profinet、Modbus tcp和TCP/IP协议,可根据实际需求而定。本方案采用的IO信号连接如下:
机器人IO输入信号:就绪、OK、NG
机器人IO输出信号:程序序号1、程序序号2、启动、复位
五、优傲机器人程序
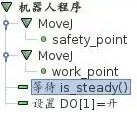
机器人程序中,在启动拧紧枪旋转信号之前写入“wait is_steady()”指令,当is_steady()返还值为真时,优傲机器人可以接受外部更大压力或扭矩,如下图所示:
拧紧方案说明和结果
a) 方案结果
可以通过监控拧紧枪在拧紧瞬间,机器人各关节实时扭矩值,判断设计方案是否合理,各关节受到扭矩值越平均越佳。在机器人线程程序中,使用脚本“get_joint_torques()”得到机器人各关节实时扭矩值,可以保持记录各关节最大扭矩值(参考附件中的小程序)。
b) 常见故障处理
故障一:螺丝枪在拧紧瞬间,由于拧紧枪产生的反作用力较大,机器人易发生保护性停止。
对策:从拧紧枪方面,可适当降低旋转速度;从机器人方面,可通过附件中的小程序监控各关节的扭矩值,若六个关节受力不均匀,需要改变机器人姿态。
故障二:螺丝枪拧完螺丝退出时,被螺丝憋住,机器人易发生保护性停止。
对策:建议螺钉不要使用内六角式(接触面积较越摩擦力越大),可以使用内梅花式或外六角式螺钉。
总结:
在使用UR10的众多拧紧项目中,测试中较为稳定的拧紧枪扭矩范围,最大可达120Nm。
显扬科技优势:
显扬科技是国家高新技术企业,在机器人、机器视觉方面有多年的研发与产业化经验,可为你提供完善的售后与保修服务,以及其他研发方面协作,并且提供专用移动机器人工作台。
显扬科技已成功销售Franka机器人、UR机器人、Robotiq夹具等产品给浙江大学,清华大学,哈尔滨工业大学等,获得了非常好的评价。显扬科技研发人员超过50人,精通UR,Franka,遨博机器人安装、调式、二次开发等,对基于协作机器人的各种应用开发已有超过8年经验。
关于显扬科技:
显扬科技(www.hinyeung.com)专注研发并产业化高速高清三维机器视觉设备、智能协作机器人系统。显扬科技创建了一个集高精度视觉传感器、智能协作机器人、智能感知与控制系统平台,让机器人更加智能、可靠,适用于更多复杂的应用场景。显扬科技研发的三维机器视觉设备精度能达亚微米级,三维数据采集帧率高达300帧,具有高精度、大景深、高稳定性的优势,已在多个领域成功替代进口同类产品。目前,显扬科技产品已成功应用于食品、电器、陶瓷、物流、教育科技、新零售等行业。显扬科技创始团队由香港中文大学数名博士组成,公司研发人员均来自海内外名校。公司知识产权超过50项,产品已经通过欧盟CE认证。显扬科技已完成投资与融资约5000万人民币。
显扬生态: UR优傲协作机器人 | AUBO遨博移动机器人 | Franka 协作机器人 | 艾利特协作机器人 | Kuka iiwa 协作机器人 | ABB工业机器人 | 海康工业镜头 | 海康工业相机 | 伯朗特工业机器人 | 爱普生Epson工业机器人 | robotiq夹爪 | robotiq真空吸盘 | robotiq腕部相机| 慧灵机器人电爪 | 研华工控机 |超恩工控机 | 创想三维3D打印机 | AGV | 机器人关节 | 精密机械加工服务
应用案例方向:1.三维机器视觉机器人引导系统 2.工业检测与测量系统3.教育行业解决方案4.智慧零售解决方案
应用场景:汽车制造行业 | 3C行业 | 电子电气 | 机械加工 | 液晶半导体 | 食品加工行业 | 医药行业 | 化工行业 | 教育行业 | 生活 | 其他行业
详询:18670025215(丁先生) www.hinyeung.com

