基于显扬科技3D视觉相机的机器人软包拆码垛系统
发布时间:2023-05-09 18:56:50 作者:显扬科技

行业现状:
随着企业的持续发展,生产规模不断扩大,传统的人工操作已难以适应大规模的货物分拣和堆垛需求。为实现更高校、更精确、更灵活的作业,越来越多企业开始采用“3D视觉+机器人”自动化方案。
3D视觉技术可以快速捕捉、识别、定位货物三维信息,其与机器人结合的智能解决方案具有高速度、高精度、强稳定的优势,可以大幅缩短作业时间,提高作业效率,并且可以7x24h不间断工作,最大限度减少人工参与,规避因操作失误带来的生产风险,实现全自动高校的货物分拣、搬运和堆垛。

行业难点:
1.劳动力成本持续上升:在人口红利退潮的背景下,人工成本节节攀升,企业需要寻找更为经济实惠的货物分拣和堆垛方案;
2.生产效率要求提高:现代物流和生产业发展迅速,市场需求增长对企业生产能力提出了更高要求,企业需要更高效的作业方式、更快速的货物处理速度;
3.操作精度要求提高:随着业务量增加和工艺升级,人工操作容易出现误差和疏漏,难以达到高精度的作业要求,影响作业质量;
4.生产规模扩大:随着企业生产规模的扩大,人工操作难以适应大规模的货物分拣和堆垛需求;
5.安全性要求提高:人工操作往往需要在高架货架、狭小空间等危险环境中进行,存在较高安全风险;
解决方案:
系统组成:
-
3D视觉传感器:用于捕捉目标物体的三维信息。
-
机器人臂:执行拆码垛任务的机械臂,需要具备足够的负载能力和精度。
-
抓手:连接在机器人臂上的执行器,负责抓取和放置物品。
-
控制系统:包括机器人控制器、视觉处理模块等,负责整个系统的运行和协调。
-
智能算法:包括物体识别、定位、深度学习、路径规划等算法,确保系统能够正确执行任务。

工作原理:
-
3D视觉传感器扫描:系统启动后,3D视觉传感器对目标区域进行扫描,获取物体的三维信息。
-
物体识别与定位:通过对扫描数据进行处理,系统识别出各个物体的位置、形状和尺寸。
-
路径规划:根据物体位置信息,系统规划机器人臂的移动路径,避免碰撞和滞后。
-
执行拆码垛任务:机器人臂按照规划的路径,配合抓手抓取和放置物品,完成拆码垛任务。
-
实时监控与调整:系统实时监控任务执行情况,如发现异常,可通过调整路径或重新识别物体等方式进行自适应调整。
核心技术:
-
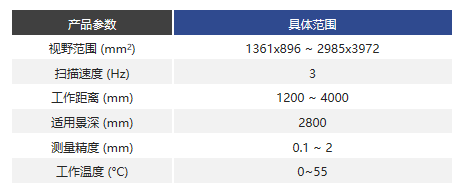
超大视野三维成像,大景深,毫米级精度,对反光塑料、软包等材料三维成像效果好,抗环境光干扰,支持混合拆垛码垛。
项目优势:
-
降低人工成本:减少对人工的依赖,降低劳动力成本;
-
改善工作环境:该系统可以在高温、高湿、高粉尘等恶劣环境中工作,减轻工人劳动强度;
-
提高安全性:该系统可以取代人工进行高空、重物等危险工作,降低工作场所的安全风险;
-
提高生产效率:该系统可以持续、高效地工作,大幅提升生产效率;
-
减少错误:通过3D视觉识别和深度学习实现精确控制,机器人可以减少人为错误,提高产品质量;
-
灵活性强:可根据不同的货物和作业环境,进行快速而精准的搬运路线和动作规划,进行柔性化智能生产。
项目总结:
基于3D视觉的机器人软包拆码垛系统通过自动化技术提高了生产效率,降低了成本,并为工作环境带来改善。随着技术的不断发展,这类系统将在越来越多的领域得到应用。
显扬科技由香港中文大学博士团队创建,主要研究并产业化高速高清三维机器视觉系统,以及智能工业机器人系统。其研发的三维机器视觉设备精度能达亚微米级,三维数据采集帧率高达310帧,此外还具有高精度、大景深、高稳定性的优势,可实现高效率机器人引导,以及工业检测与测量。显扬科技的产品主要应用在对采集速度要求较高的快速工业产线、物流枢纽以及对测量精度要求高的精密制造、军工航天、半导体产业等。


