UR5机器人的安装和卸载教程
发布时间:2022-01-12 17:24:12 作者:显扬科技
机器人手臂安装
使用四颗 M8 螺栓,通过机器人机座上的四个 8.5 mm 孔来安装机器人手臂。建议以 10 Nm 扭矩紧固这些螺栓。如果需要非常准确地调整机器人手臂的位置,可以使用预留的两个 Ø8 孔,并用销钉加以固定。也可采购精确的基座作为附件来使用。机器人连接器电缆可穿过基座的侧面或底部安装。将机器人安装在一个坚固的表面,该表面应当足以承受至少 10 倍的基座关节的完全扭转力,以及至少 5 倍的机器手臂的重量。此外,该表面应没有震动。如果机器人安装在线性轴上或是活动的平台上,则活动性安装基座的加速度应很低。高加速度会导致机器人停止,因为机器人会误以为撞到东西。
安装和卸载接口
要实现安全功能冗余,控制箱必须能够知道是否存在 Euromap 67 接口。因此,安装和卸载接 口时必须严格遵循以下安装和卸载程序。
请注意下面带状电缆的方向。
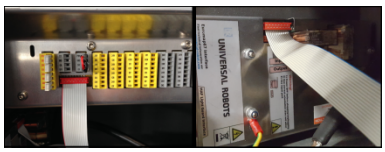
带状电缆连接
接口可以安装在控制箱底部或左侧,请参见下图并遵循下面的程序执行操作。严禁以任何其他方式安装接口。
1. 切断控制箱电源。
• 示教盒电源按钮的绿灯必须熄灭。
2. 安装接口。
• 将 1 颗 M6 螺母拧在接地连接器上。
• 将 4 颗 M4×8mm 螺丝拧到接口上。
• 拧上 4 颗 M4×8mm 螺丝,堵住空孔。
• 向右按压带状电缆。
• 使用一些受钉嵌条固定带状电缆。
3. 打开控制箱电源。
• 系统将自动检测接口。
• 机器人安全系统报告 EUROMAP 67 已检测到,但未在机器人安装中定义。转至“安 装设置”、“安全”和“其他”,然后选中 Euromap67 复选框。
• 按保存并重启按钮。
• GUI 将重启。
• 确认新的安全设置。
• EUROMAP 67 现已安装,可随时使用。
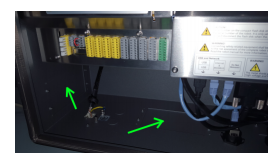
控制箱中的接口布局
1. 切断控制箱电源。
• 示教盒电源按钮的绿灯必须熄灭。
2. 拆卸接口。
• 拆卸带状电缆。
• 从接地连接器上卸下 M6 螺母。
• 从控制箱外部卸下所有 M4 螺丝。
3. 打开控制箱电源。
• 机器人安全系统报告 EUROMAP 67 已在机器人安装中定义,但在系统中检测不
到。转至“安装设置”、“安全”和“其他”,然后取消选中 Euromap67 复选框。
• 按保存并重启按钮。
• GUI 将重启。
• 确认新的安全设置。
• EUROMAP 6 现已卸载。
显扬科技通过自主研发的高速高清三维机器视觉设备,以及智能工业机器人系统,联合多个知名机器人与机器人夹具企业,构建了一个机器人生态系统。显扬生态的产品能够完美的与显扬科技的机器视觉产品结合,包含通信协议、图形处理SDK、操作案例等。显扬科技同时是这些企业的代理商,可以提供可靠、性价比高的产品。目前显扬科技生态系统包括以下品牌:UR优傲协作机器人 、AUBO遨博移动机器人、Franka Emika 协作机器人、艾利特Elite协作机器人、Kuka iiwa 协作机器人、ABB工业机器人、海康工业镜头 、海康工业相机、伯朗特工业机器人、 爱普生Epson工业机器人、 robotiq夹爪 、robotiq真空吸盘、robotiq腕部相机、慧灵机器人电爪 、大寰机器人电爪、研华工控机、超恩工控机、创想三维3D打印机 、Mir AGV、机器人关节、精密机械加工服务。通过显扬生态,客户可以快速找到合适的机器人本体、夹具等,并快速部署基于显扬三维机器视觉产品的工业应用。


